Цифровой синхронный измеритель поверхностного импеданса
Аннотация
Описан аппаратно-программный комплекс, предназначенный для получения зависимостей мгновенных значений электрического поля Eот напряженности магнитного поля H, а также, зависимости модуля поверхностного импеданса и сдвига фаз электрического и магнитного полей от амплитуды переменного магнитного поля. Для анализа спектрального отклика образца применен метод цифрового синхронного детектирования. Приведены результаты работы комплекса для ферромагнитных веществ, парамагнетиков и диэлектриков.
Ключевые слова: поверхностный импеданс, ферромагнетики, переменное магнитное поле, переменное электрическое поле, цифровое синхронное детектирование.Ключевые слова:
Нелинейные свойства материалов лежат в основе работы многих современных устройств и приборов в различных областях науки и техники. Одними из самых востребованных нелинейных материалов в современной электронике являются ферромагнитные вещества. Существует большое количество теоретических наработок по этому направлению [1] и, в частности, по исследованию процессов намагничивания и перемагничивания ферромагнетиков в однородных и неоднородных магнитных полях [2].
Разработанное устройство предназначено для получения зависимостей мгновенных значений электрического поля E от напряженности магнитного поля H, а также, зависимости модуля поверхностного импеданса и сдвига фаз электрического и магнитного полей от амплитуды переменного магнитного поля. Оно выполнено в виде устройства сопряжения к ЭВМ с соответствующим оригинальным программным обеспечением. В основу положен классический метод определения поверхностного импеданса цилиндрических образцов на базе четырёхзажимного взаимноиндукционного метода [3]. Для создания переменного магнитного поля используется соленоид. Измерительная схема основана на дифференциальном датчике [4], что позволяет улучшить чувствительность измерителя [5]. Для защиты от высокочастотных электромагнитных полей используется внешний металлический цилиндрический экран.
В рамках метода в катушке L1 генерируется тестовое переменное магнитное поле с напряженностью H=A1×cos(ωt). При этом в катушке L3L4, согласно закону электромагнитной индукции, наводится переменное электрическое поле напряженностью E.
Конструкция дифференциального датчика, использованного для измерения индукции магнитного поля, приведена на рис. 1.
Рис. 1 Конструкция датчика, где 1 – катушка переменного поля L1, 2 – измерительная секция L3 дифференциальной катушки L3L4, 3 – компенсационная секция L4 дифференциальной катушки L3L4, 4 – исследуемый образец, 5 – цилиндрический каркас из стекла, 6 – резиновый держатель образца.
Катушка L3L4 разделена на две идентичные по параметрам секции (измерительную и компенсационную), имеющие встречное включение. Образец помещается только в измерительную секцию. Таким образом, в катушке L3L4наводится переменное напряжение U34 = U3–U4 = A34×cos(ω0t+j34), где U3,U4 значения переменных напряжений наводимых в секциях L3 и L4соответственно:
![]() ,
, ![]() (1)
(1)
где ![]() – магнитная постоянная, R3– радиус катушки, S3 – площадь сечения катушки, N3 – число витков в одной из секций катушки L3L4.
– магнитная постоянная, R3– радиус катушки, S3 – площадь сечения катушки, N3 – число витков в одной из секций катушки L3L4.
Учитывая (1), получаем, что электрическое поле, наводимое в образце, будет определяться:
![]() (2)
(2)
Отношение амплитуд напряженности первых гармоник электрического поля на поверхности образца к амплитуде напряженности заданного магнитного поля называется поверхностным импедансом:
![]() (3)
(3)
При установке образца с нелинейной магнитной восприимчивостью в измерительной секции катушки L3L4наводится сигнал сложной формы, содержащий также и высшие гармоники тестового сигнала. ЭДС компенсационной секции катушки L3L4содержит только первую гармонику. Так как катушки соединены дифференциально, то в выходном сигнале вклад высших гармоник, несущих информацию об изучаемом материале, будет значительно заметнее.
Для анализа спектрального состава отклика нелинейного образца можно использовать различные современные алгоритмы цифровой обработки сигналов, такие как авторегрессионная модель, метод MUSIC, метод EV, метод Прони и др. [6]. Реализован метод цифрового синхронного детектирования [7], позволяющий получить абсолютные значения амплитуд и фаз оцифрованного сигнала, полученных синхронно с ним отсчётов тестового воздействия.
Пусть имеется опорный сигнал S0(t)=A0×sin(ωt). Представим сигнал на задающей катушке L1в виде:
S1(t)=A1sin(ωt+φ1)= p1sin(ωt)+ q1cos(ωt),
и сигнал с дифференциального датчика L3L4в виде:
S2(t)=A2sin(ωt+φ2)= p2sin(ωt)+ q2cos(ωt),
где A1, A2 – амплитуды, φ1, φ2– начальные фазы сигналов относительно опорного сигнала, ω – циклическая частота опорного сигнала, t – время, p1,q1,p2,q2 – амплитуды квадратурных компонент.
Квадратурные компоненты гармоник m сигналов S1(ti) и S2(ti) вычисляются согласно соотношениям [7]:
 . (4)
. (4)
Для корректной работы данного метода необходимо, чтобы частота синхронизации опорного сигнала точно совпадала с частотой исследуемых сигналов, а также, чтобы оба сигнала оцифровывались одновременно. Таким образом, из экспериментально измеренных отсчетов сигналов S1(ti)и S2(ti) из формулы (4) определяются амплитуды и фазы гармоник сигнала в задающей катушке, пропорционального напряженности переменного магнитного поля, и напряжения с измерительной катушки:
 .
.
При этом разность фаз Δφ=φ2-φ1 между двумя синхронными сигналами:
 .
.
Рис. 2 Блок-схема аппаратной части комплекса
При использовании современных цифровых систем формирования и обработки сигналов разработана и изготовлена структурная схема аппаратной части устройства, представленная на рис. 2. Измерительный комплекс имеет три основные составные части:
- Генераторный модуль ГМ – осуществляет генерацию и задание синусоидального тока. Имеет независимый канал связи с ПК через цифровой интерфейс передачи данных USB1. Это позволяет управлять частотой и амплитудой сигнала непосредственно с ПК при помощи оригинального специализированного программного обеспечения.
- Датчик Д – представляет собой дифференциальный датчик с закрепленным на нем инструментальным предусилителем, помещенный в массивный экран.
- Измерительный модуль ИМ – осуществляет предварительное усиление и фильтрацию выходного сигнала датчика. По запуску внешнего прерывания производится синхронная оцифровка сигналов измерительной катушки и сигнала задающей катушки. Модуль имеет независимый канал связи с ПК через порт USB2. Оцифрованные сигналы поступают в ПК, где производится их дальнейший спектральный анализ.
Генераторный модуль изготовлен по принципу “материнской платы” – на одной плате размещаются управляющий контроллер с элементами питания и разъёмы для подключения плат с цифровым синтезатором частот, масштабирующим ЦАП и необходимыми операционными усилителями для схемы сдвига уровня.
Формирование тестового сигнала в генераторном блоке осуществляется на базе цифрового синтезатора частот фирмы Analog Devices AD9850 [8]. Применение данного синтезатора позволяет получать синусоидальный сигнал в диапазоне 1 Гц – 40 МГц с шагом 1 Гц и точностью 0.0291 Гц. Далее сигнал фильтруется с помощью ФНЧ Бесселя 4-го порядка, выполненного на базе операционных усилителей фирмы Texas Instruments OPA211 [9], что снижает полосу пропускания до 200 кГц. Для управления амплитудой сигнала использован 12-разрядный умножающий ЦАП фирмы Texas Instruments DAC7821 [10]. Для формирования в датчике переменного тока использован источник тока, управляемый напряжением (ИТУН), изготовленный на базе мощного высоковольтного операционного усилителя фирмы Texas Instruments OPA548 [11] в стандартной схеме включения ИТУН с заземленной нагрузкой [12]. Аппаратная реализация генераторного модуля позволяет получать в модулирующей катушке переменные токи до 2А с шагом 10 мА в частотном диапазоне 200 кГц с шагом 1 Гц и постоянный ток до 5А с шагом 10 мА.
Датчик выполнен в виде трёх соосно расположенных катушек: соленоида для задания переменного магнитного поля, соленоида для задания постоянного магнитного поля, двухсекционной дифференциальной измерительной катушки. Соотношение числа витков катушек 600/150+150. Расстояние между секциями измерительной катушки подобрано таким образом, чтобы исключить взаимное влияние секций. Для исключения влияния граничных эффектов на торцах исследуемого образца длины катушек в три раза меньше длины образца. Для улучшения соотношения сигнал/шум с дифференциальной катушки датчика предварительное усиление выполнено максимально близко от источника – непосредственно на каркасе датчика. Влияние внешних электромагнитных помех уменьшается применением цилиндрического массивного металлического экрана.
Конструкция датчика с учётом технических характеристик генераторного блока позволяет исследовать образцы в переменном магнитном поле с напряженностью до 50 Э с шагом 0.01 Э в частотном диапазоне до 50 кГц.
Аппаратная реализация измерительного модуля основана на применении специализированной микросхемы АЦП фирмы Analog Devices AD7265 [13]. Эта микросхема имеет два независимых 6-ти канальных 12-ти битных АЦП последовательного приближения с общим сигналом тактирования и частотой дискретизации до 1 MSPS. На вход АЦП поступает два сигнала – с ИТУН генераторного модуля, пропорциональный току в катушке переменного поля, и сигнал с дифференциальной катушки датчика. Оба сигнала предварительно обрабатываются инструментальными усилителями INA128 [14] фирмы Texas Instruments. Отсчеты сигналов после преобразования АЦП поступают во внутреннюю память микроконтроллера (МК2) и далее в ПК для дальнейшей обработки.
Реализованное схемотехническое решение позволяет оцифровывать сигналы с частотой дискретизации до 50 кГц и длиной выборки до 32 кБ на канал. Быстодействие схемы ограничено исключительно скоростными характеристиками управляющего микроконтроллера (МК1). МК1 и МК2 являются микроконтроллерами фирмы Atmel ATMega16 [15].
Для управления измерителем разработано специализированное программное обеспечение, в задачу которого входит как задание всех необходимых параметров генераторного и измерительного модулей установки, так и обработка оцифрованной информации методом цифрового синхронного детектирования. Предусмотрено два режима измерений - анализ либо частотных зависимостей, либо амплитудных. В первом случае задается частотный диапазон исследования и значение амплитуды напряженности магнитного поля, во втором – диапазон изменения амплитуды магнитного поля при фиксированной частоте. Программа визуализирует как промежуточные результаты функционирования комплекса (зависимость мгновенных значений электрического поля E от напряженности магнитного поля H), так и полученные зависимости модуля поверхностного импеданса и сдвига фаз электрического и магнитного полей от амплитуды или частоты переменного магнитного поля.
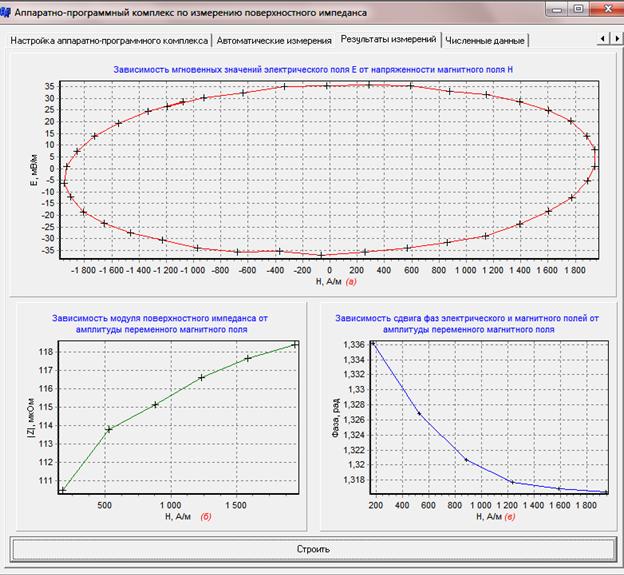
Рис. 3 Интерфейс аппаратно-программного комплекса
Для парамагнитных веществ, таких как медь, алюминий, латунь, комплекс показал независимость модуля поверхностного импеданса и сдвига фазы электрического и магнитного полей от амплитуды переменного магнитного поля.
Интерфейс программы с результатами анализа амплитудных зависимостей для цилиндрического образца из стали марки 45 (ГОСТ 1050-88) радиуса 9мм и длиной 2 см представлен на рис. 3.
Таким образом, разработанный и изготовленный аппаратно-программный комплекс позволяет исследовать линейные парамагнитные и нелинейные ферромагнитные вещества в переменном магнитном поле до 50 Э в частотном диапазоне до 50 кГц с шагом до 0.0291 Гц. Погрешность измерений напряженностей магнитного и электрического поля не превышает 1% во всем диапазоне частот и амплитуд магнитного поля. Погрешность в определении фазы не более 0.5%.
Литература
-
1.Колесников П.М. Введение в нелинейную электродинамику. — Минск.: Наука и техника, 1971. — 384 с
2. Зацепин Н.Н. Лаборатория электромагнетизма. Режим доступа: [http://iaph.bas-net.by/~lab5/index.html].
3.Левшина Е. С., Новицкий П. В. Электрические измерения физических величин. — Л.: Энергоатомиздат, 1983. — 320 с.
4.Михеев М. Н., Горкунов Э. С. Магнитные методы структурного анализа и неразрушающего контроля. — М.: Наука, 1993. — 252 с.
5.Чечерников В.И., Магнитные измерения. — М.: МГУ, 1969. — 388 с.
6.Сергиенко А. Б. Цифровая обработка сигналов. — СПб.: Питер, 2002. — 608 с.
7.Лапшин В.И., Васильков А.В., Абезгауз Б.Е., Ларионов Ю.П. «Измерение параметров гармонических сигналов во вторичных преобразователях на базе ЦОС» // Всероссийская научно-практическая конференция «Датчики и системы 2006» – М: 2006.
8.Техническое описание микросхемы AD9850. Режим доступа: [http://www.analog.com/static/imported-files/data_sheets/AD9850.pdf].
9. Техническое описание микросхемы OPA211. Режим доступа: [http://www.ti.com/lit/ds/symlink/opa211.pdf].
10.Техническое описание микросхемы DAC7821. Режим доступа: [http://www.ti.com/lit/ds/symlink/dac7821.pdf].
11. Техническое описание микросхемы OPA548. Режим доступа: [http://www.ti.com/lit/ds/symlink/opa548.pdf].
12. Пейтон А.Дж., Волш В. Аналоговая электроника на операционных усилителях. — М.: Бином, 1994. — 352 с.
13. Техническое описание микросхемы AD7265. Режим доступа: [http://www.analog.com/static/imported-files/data_sheets/AD7265.pdf].
14.Техническое описание микросхемы INA128. Режим доступа: [http://www.ti.com/lit/ds/symlink/ina128.pdf].
15. Техническое описание микросхемы ATMEGA16. Режим доступа: [http://www.atmel.com/dyn/resources/prod_documents/doc2466.pdf].