Выделение информативной гармоники при балансировке ротора
Аннотация
Представлена разработка методики анализа сложных процессов колебаний каждой точки съема информации при балансировке ротационного агрегата на машине. Рассмотрены все возможные случаи привода этого агрегата, для каждого из которых определена последовательность и условия тестовых запусков вращения агрегата, построен алгоритм расчетов по выделению информативной гармоники, определяемой только неуравновешенностью балансируемого агрегата.
Ключевые слова: ротор, балансировка на месте, информативная гармоника, тестирование, расчет.Ключевые слова:
При балансировке ротора на месте [1] (без снятия с машины) характеристики его неуравновешенности (дисбалансы в плоскостях коррекции) определяются посредством замера характеристик колебаний (амплитуд и фаз) некоторых точек машины на частоте f вращения ротора. Обычно такими точками съема информации принимают опоры ротора на машине или другие ее точки, в которых наиболее сильно проявляются колебания от неуравновешенности балансируемого ротора.
С приводом балансируемого ротора во вращение от двигателя машины производится непосредственный замер сложного со случайными составляющими полигармонического процесса колебаний в каждой из точек съема информации. Разработанный на кафедре «Теория механизмов и машин» Донского государственного технического университета (ДГТУ, г. Ростов-на-Дону) метод математической фильтрации колебательного процесса с помощью виброизмерительного комплекса, состоящего из датчиков вибрации, многоканального аналого-цифрового преобразователя (АЦП) и компьютера, реализующего рекурсивный алгоритм наименьших квадратов [2], позволяет с высоким уровнем достоверности выделить из этого колебательного процесса результирующую гармонику ![]() с частотой f. Амплитуда
с частотой f. Амплитуда ![]() и фаза
и фаза ![]() этой гармоники надежно идентифицируются этим комплексом даже в случае, если дисперсия
этой гармоники надежно идентифицируются этим комплексом даже в случае, если дисперсия ![]() составляет до 5% общей дисперсии колебательного процесса.
составляет до 5% общей дисперсии колебательного процесса.
В большинстве случаев выявленные измерением и обработкой их результатов характеристики ![]() помимо неуравновешенности балансируемого агрегата, могут определяться и другими сторонними источниками детерминированных колебаний с частотой f вращения этого агрегата. В общем случае к ним можно отнести:
помимо неуравновешенности балансируемого агрегата, могут определяться и другими сторонними источниками детерминированных колебаний с частотой f вращения этого агрегата. В общем случае к ним можно отнести:
• другие ротационные агрегаты, имеющие ту же скорость вращения, что и рассматриваемый;
• двигатели внутреннего сгорания и шарнирно-рычажные механизмы, создающие при работе динамические воздействия и вибрации в широком и практическом непрерывном спектре частот, который может содержать и частоту f гармоники ![]() ;
;
• погрешности исполнения элементов передач (шкивов, зубчатых колёс и пр.) привода рассматриваемого ротора. Так, радиальное биение этих элементов приводит при работе машины к периодическим внутренним деформациям элементов конструкции машины, создающим гармонические воздействия с частотой f .
Как следствие, в общем случае
![]() , (1)
, (1)
где ![]() - информативная гармоника, генерируемая в точке съема информации неуравновешенностью рассматриваемого ротора;
- информативная гармоника, генерируемая в точке съема информации неуравновешенностью рассматриваемого ротора; ![]() - гармоника, генерируемая там же всеми другими агрегатами машины;
- гармоника, генерируемая там же всеми другими агрегатами машины; ![]() - гармоника, генерируемая там же всеми элементами привода балансируемого агрегата.
- гармоника, генерируемая там же всеми элементами привода балансируемого агрегата.
Балансировка ротора требует выделения ![]() . Чем меньше сторонних источников колебаний с частотой f имеет место в машине, тем проще выделение
. Чем меньше сторонних источников колебаний с частотой f имеет место в машине, тем проще выделение ![]() из
из ![]() , тем надёжнее и достовернее определение её характеристик. Именно поэтому при решении вопросов балансировки рассматриваемого ротора на машине стремятся отключить приводы как можно большего числа её других агрегатов. По возможности используют даже индивидуальный привод рассматриваемого ротора на машине с помощью приводной колонки. Этим, как и на балансировочном станке, практически полностью устраняются сторонние источники колебаний с частотой f, обеспечивая равенство
, тем надёжнее и достовернее определение её характеристик. Именно поэтому при решении вопросов балансировки рассматриваемого ротора на машине стремятся отключить приводы как можно большего числа её других агрегатов. По возможности используют даже индивидуальный привод рассматриваемого ротора на машине с помощью приводной колонки. Этим, как и на балансировочном станке, практически полностью устраняются сторонние источники колебаний с частотой f, обеспечивая равенство ![]() . В наиболее распространенных случаях, когда отмеченное выше не представляется возможным, выделение
. В наиболее распространенных случаях, когда отмеченное выше не представляется возможным, выделение ![]() из
из ![]() требует проведения дополнительных исследований, замеров вибраций и их обработки.
требует проведения дополнительных исследований, замеров вибраций и их обработки.
Рассмотрим случай наличия в машине ![]() посторонних агрегатов, каждый из которых генерирует в точке регистрации колебательного процесса гармонику
посторонних агрегатов, каждый из которых генерирует в точке регистрации колебательного процесса гармонику ![]() с амплитудой
с амплитудой ![]() и фазой
и фазой ![]() ,
, ![]() . На валу рассматриваемого ротора этой машины расположено
. На валу рассматриваемого ротора этой машины расположено ![]() элементов передач, погрешность исполнения каждого из которых будет генерировать в точке замера колебательного процесса гармонику
элементов передач, погрешность исполнения каждого из которых будет генерировать в точке замера колебательного процесса гармонику ![]() с амплитудой
с амплитудой ![]() и фазой
и фазой ![]() ,
, ![]() . Т.к. все эти гармоники имеют одну частоту f ,
. Т.к. все эти гармоники имеют одну частоту f ,
 - (2)
- (2)
- суммарная гармоника с амплитудой ![]() и фазой
и фазой ![]() от всех посторонних агрегатов машины;
от всех посторонних агрегатов машины;
 - (3)
- (3)
- суммарная гармоника с амплитудой ![]() и фазой
и фазой ![]() от погрешностей исполнения всех элементов передач рассматриваемого ротора на машине.
от погрешностей исполнения всех элементов передач рассматриваемого ротора на машине.
Таким образом, задача отделения в результирующей гармонике ![]() информативной части
информативной части ![]() сводится к определению параметров гармоник
сводится к определению параметров гармоник ![]() и
и ![]() и (при определенном
и (при определенном ![]() ) нахождению
) нахождению ![]() .
.
Рассматривая сначала определение ![]() и нахождение из (1)
и нахождение из (1) ![]() , заметим, что методика отыскания
, заметим, что методика отыскания ![]() определяется характером привода рассматриваемого ротора, соединяющего его с другими агрегатами машины. Механизм этого привода может допускать и не допускать отключение рассматриваемого агрегата от остальных агрегатов. Эти два случая требуют отдельного рассмотрения.
определяется характером привода рассматриваемого ротора, соединяющего его с другими агрегатами машины. Механизм этого привода может допускать и не допускать отключение рассматриваемого агрегата от остальных агрегатов. Эти два случая требуют отдельного рассмотрения.
Механизм привода ротора, допускающего его отключение, представляет собой фрикционную или кулачковую муфту, леникс или иное устройство, создающее возможность конечного проворота рассматриваемого ротора относительно остальных агрегатов перед каждым его запуском. Конечный проворот остальных агрегатов друг относительно друга не происходит, т.к. при наличии такой возможности эти агрегаты должны быть отключены при исходной регистрации колебательного процесса. Поэтому все эти агрегаты и будут создавать в точке замера колебательного процесса гармонику ![]() , параметры
, параметры ![]() и
и ![]() которой по (2) от пуска к пуску рассматриваемого ротора будут неизменными в системе координат, связанной с машиной.
которой по (2) от пуска к пуску рассматриваемого ротора будут неизменными в системе координат, связанной с машиной.
При тех же условиях, в системе координат, связанной с рассматриваемым ротором, параметр ![]() гармоник
гармоник ![]() сохраняет своё значение, однако фаза
сохраняет своё значение, однако фаза ![]() этой гармоники будет меняться от пуска к пуску рассматриваемого агрегата из-за отмеченной выше возможности его конечного относительного проворота.
этой гармоники будет меняться от пуска к пуску рассматриваемого агрегата из-за отмеченной выше возможности его конечного относительного проворота.
Изложенное приводит к тому, что, осуществляя на одной и той же машине, в одном и том же её кинематическом режиме, в одной и той же её точке, в одном и том же направлении ![]() регистраций колебательного процесса при
регистраций колебательного процесса при ![]() запусках рассматриваемого ротора и выделяя в каждой
запусках рассматриваемого ротора и выделяя в каждой ![]() реализации гармонику
реализации гармонику ![]() , можем получить совершенно несравнимые значения их параметров при различных i. В каждой из этих реализаций имеет место случайное значение угла
, можем получить совершенно несравнимые значения их параметров при различных i. В каждой из этих реализаций имеет место случайное значение угла ![]() проворота рассматриваемого ротора относительно остальных агрегатов. Поэтому случайной, но сохраняющей постоянное значение в каждой i-й реализации колебательного процесса, будет фаза
проворота рассматриваемого ротора относительно остальных агрегатов. Поэтому случайной, но сохраняющей постоянное значение в каждой i-й реализации колебательного процесса, будет фаза ![]() гармоники
гармоники ![]() , амплитуда ас которой будет сохранять постоянное значение во всех
, амплитуда ас которой будет сохранять постоянное значение во всех ![]() реализациях колебательного процесса. Это и объясняет возможность появления значительных различий параметров гармоники
реализациях колебательного процесса. Это и объясняет возможность появления значительных различий параметров гармоники ![]() , выявленных по различным реализациям колебательного процесса.
, выявленных по различным реализациям колебательного процесса.
На рис.1 представлена схема формирования гармоники ![]() , выделенной из i-й реализации колебательного процесса. Компонентами этой гармоники являются:
, выделенной из i-й реализации колебательного процесса. Компонентами этой гармоники являются:
• неизвестная гармоника ![]() с амплитудой
с амплитудой ![]() и фазой
и фазой ![]() , генерируемая неуравновешенностью и погрешностями геометрии элементов передач привода рассматриваемого ротора;
, генерируемая неуравновешенностью и погрешностями геометрии элементов передач привода рассматриваемого ротора;
• неизвестная гармоника ![]() с неслучайной амплитудой
с неслучайной амплитудой ![]() и случайной фазой
и случайной фазой ![]() .
.
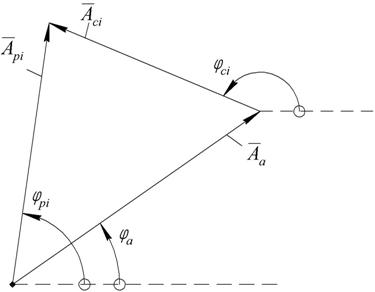
Рис. 1. Формирование гармоники ![]() в i-й реализации колебательного процесса с приводом ротора, допускающим его отключение.
в i-й реализации колебательного процесса с приводом ротора, допускающим его отключение.
Из указанного рисунка следует
![]() . (4)
. (4)
С регистрацией i-й реализации колебательного процесса и выделением из неё гармоники ![]() становятся определёнными значения её амплитуды
становятся определёнными значения её амплитуды ![]() и фазы
и фазы ![]() . Осуществляя регистрацию и обработку трёх таких реализаций при последовательном отключении рассматриваемого агрегата от привода (
. Осуществляя регистрацию и обработку трёх таких реализаций при последовательном отключении рассматриваемого агрегата от привода (![]() ), на основании (4) при
), на основании (4) при ![]() получаем
получаем
 , (5)
, (5)
где значения ![]() ,
, ![]() определены для всех
определены для всех ![]() с помощью представленного выше измерительного комплекса.
с помощью представленного выше измерительного комплекса.
Решение системы (5) находим по следующему алгоритму:
![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
 ;
;  ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() . (6)
. (6)
При решении вопросов балансировки или диагностирования качества балансировки ротора на машине с использованием представленного метода и алгоритма (6) могут встретиться следующие частные случаи, требующие особого подхода,:
• выявление гармоник ![]() обработкой регистрируемых колебательных процессов даёт незначительное (в пределах погрешностей замеров) расхождение параметров
обработкой регистрируемых колебательных процессов даёт незначительное (в пределах погрешностей замеров) расхождение параметров ![]() и
и ![]() этой гармоники по всем
этой гармоники по всем ![]() . Это свидетельствует о практическом отсутствии или пренебрежимой малости амплитуды
. Это свидетельствует о практическом отсутствии или пренебрежимой малости амплитуды ![]() от сторонних источников в регистрируемых колебательных процессах. В последующих расчётах этот случай требует использования осреднённых параметров гармоники
от сторонних источников в регистрируемых колебательных процессах. В последующих расчётах этот случай требует использования осреднённых параметров гармоники ![]() , отыскиваемых по уравнениям для расчёта
, отыскиваемых по уравнениям для расчёта ![]() и
и ![]() из алгоритма (6), в которых
из алгоритма (6), в которых
 ,
,  ; (7)
; (7)
• из-за случайности угла ![]() в двух зарегистрированных реализациях колебательного процесса эти углы оказались практически одинаковыми (взаимное расхождение выявленных значений
в двух зарегистрированных реализациях колебательного процесса эти углы оказались практически одинаковыми (взаимное расхождение выявленных значений ![]() и
и ![]() этих реализаций не превзошло 5%). Значения этих параметров для третьей реализации случайно или неслучайно существенно отличается от совпадающих. Расчёт по алгоритму (6) в этом случае ведёт к значительной ошибке. Исключение её требует проведения дополнительных регистраций колебательных процессов при новых запусках рассматриваемого ротора и их обработки для обоснования возможности или невозможности пренебрежения гармоникой
этих реализаций не превзошло 5%). Значения этих параметров для третьей реализации случайно или неслучайно существенно отличается от совпадающих. Расчёт по алгоритму (6) в этом случае ведёт к значительной ошибке. Исключение её требует проведения дополнительных регистраций колебательных процессов при новых запусках рассматриваемого ротора и их обработки для обоснования возможности или невозможности пренебрежения гармоникой ![]() для последующего определения
для последующего определения ![]() ,
, ![]() по алгоритму (6) или (7).
по алгоритму (6) или (7).
В отличие от рассмотренного выше случая, «жёсткий» привод ротора исключает возможность остановки его вращения без отключения всех остальных агрегатов машины. Конечный проворот рассматриваемого ротора относительно других задействованных вместе с ним агрегатов невозможен, т.к. кинематическая цепь привода рассматриваемого ротора не содержит устройств отключения его вращения, оговоренных выше. Поэтому во всех реализациях колебательного процесса относительная фаза гармоник ![]() и
и ![]() имеет одно и то же значение
имеет одно и то же значение ![]() .
.
На рис.2 сплошными линиями показана схема формирования гармоники ![]() , выделенной из регистрации колебательного процесса.
, выделенной из регистрации колебательного процесса.
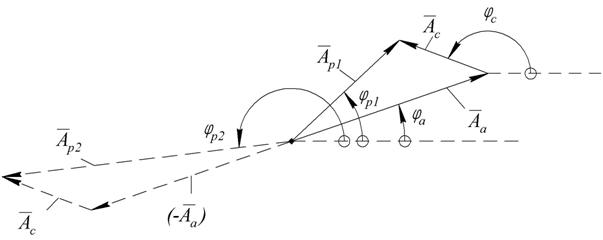
Рис. 2. Формирование гармоник ![]() для ротора с приводом, не допускающим его отключение.
для ротора с приводом, не допускающим его отключение.
Повышение надёжности определения характеристик ![]() ,
, ![]() этой гармоники достигается осреднением результатов расчётов этих характеристик по
этой гармоники достигается осреднением результатов расчётов этих характеристик по ![]() реализациям колебательного процесса с помощью специально разработанного алгоритма. Результатами расчёта по этому алгоритму будут значения
реализациям колебательного процесса с помощью специально разработанного алгоритма. Результатами расчёта по этому алгоритму будут значения ![]() ,
, ![]() параметров искомой гармоники
параметров искомой гармоники ![]() .
.
Развернём рассматриваемый ротор на 1800 относительно других агрегатов. Для этого необходимо частично демонтировать его привод, что в преобладающем большинстве конструкций машин не вызывает затруднений. С приведением этого ротора во вращение с той же скоростью производятся замеры колебательных процессов в той же точке. Обработка этих замеров осуществляется с помощью того же алгоритма, что использован при расчете ![]() . Результатами будут значения
. Результатами будут значения ![]() ,
, ![]() параметров гармоники
параметров гармоники ![]() , схема формирования которой представлена на рис.2 пунктирными линиями.
, схема формирования которой представлена на рис.2 пунктирными линиями.
С расчетом ![]() ,
, ![]() нашли
нашли ![]() , что позволяет получить
, что позволяет получить ![]() ;
; ![]() и найти искомые параметры
и найти искомые параметры ![]() ,
, ![]() гармоники
гармоники ![]() по соответствующим уравнениям алгоритма (6). Учитывая при этом, что после проворота и испытания рассматриваемого ротора его обратный проворот не имеет смысла, при дальнейшем решении задач балансировки этого ротора следует полагать
по соответствующим уравнениям алгоритма (6). Учитывая при этом, что после проворота и испытания рассматриваемого ротора его обратный проворот не имеет смысла, при дальнейшем решении задач балансировки этого ротора следует полагать ![]() .
.
В частном случае, когда замеры колебательных процессов и расчёты параметров гармоник ![]() ,
, ![]() , выявят, что
, выявят, что  ;
; ![]() ;
; ![]() , имеем
, имеем ![]() ,
, ![]() ;
; ![]() .
.
Представленные выше методики и полученные соотношения позволяют устанавливать параметры ![]() ,
, ![]() гармоники
гармоники ![]() , генерируемой неуравновешенностью (
, генерируемой неуравновешенностью (![]() ) и погрешностями передач привода (
) и погрешностями передач привода (![]() ) рассматриваемого ротационного агрегата машины на частоте f. Для выделения информативной гармоники
) рассматриваемого ротационного агрегата машины на частоте f. Для выделения информативной гармоники ![]() из гармоники
из гармоники ![]() необходимо провести замеры и соответствующую обработку колебательных процессов при различных значениях относительных фазовых сдвигов компонентов
необходимо провести замеры и соответствующую обработку колебательных процессов при различных значениях относительных фазовых сдвигов компонентов ![]() . Реализация таких сдвигов практически возможна лишь в случаях, когда конструкция соединения всех элементов привода (шкивов, звёздочек, зубчатых колёс, полумуфт) с валом рассматриваемого ротора допускает возможность их одновременного проворота относительно вала. Такую возможность создают, например, шлицевые, клеммовые соединения.
. Реализация таких сдвигов практически возможна лишь в случаях, когда конструкция соединения всех элементов привода (шкивов, звёздочек, зубчатых колёс, полумуфт) с валом рассматриваемого ротора допускает возможность их одновременного проворота относительно вала. Такую возможность создают, например, шлицевые, клеммовые соединения.
Рассматривая далее отмеченный случай, будем исходить из допущения об отсутствии или пренебрижимой малости дополнительных разбалансировок, которые могут возникнуть при провороте элемента передачи относительно его посадочного места на валу рассматриваемого ротационного агрегата машины. При этом методики разделения гармоники ![]() для различных типов привода балансируемого ротора различны и требуют отдельного рассмотрения.
для различных типов привода балансируемого ротора различны и требуют отдельного рассмотрения.
Если привод рассматриваемого ротора при различных его запусках допускает случайный проворот этого ротора относительно других агрегатов машины, то разделение ![]() на составляющие
на составляющие ![]() и
и ![]() требует проворота на 1800 всех элементов передач привода ротора и повторного проведения замеров и расчётов по алгоритму (6). Результатами будут параметры
требует проворота на 1800 всех элементов передач привода ротора и повторного проведения замеров и расчётов по алгоритму (6). Результатами будут параметры ![]() ,
, ![]() гармоники
гармоники ![]() .
.
На рис.3 представлены схемы формирования гармоники ![]() , определенной до проворота на 1800 элементов передач, установленных на валу рассматриваемого ротора (сплошные линии), и гармоники
, определенной до проворота на 1800 элементов передач, установленных на валу рассматриваемого ротора (сплошные линии), и гармоники ![]() , определённой после этого проворота (пунктирные линии).
, определённой после этого проворота (пунктирные линии).
С расчетом характеристик этих гармоник получаем ![]() , что позволяет найти
, что позволяет найти
![]() ;
; ![]() ;
;
![]() ;
; ![]() -
-
- параметры информативной гармоники ![]() .
.
Если привод рассматриваемого ротора при различных его запусках не допускает случайного конечного проворота этого ротора относительно других агрегатов машины, то разделение на составляющие ![]() и
и ![]() требует, как в предыдущем случае,
требует, как в предыдущем случае,
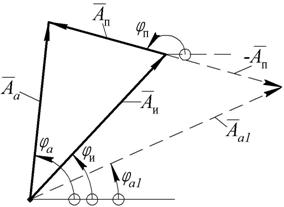
Рис. 3. К определению ![]() для привода, допускающего при пуске случайный конечный проворот ротора.
для привода, допускающего при пуске случайный конечный проворот ротора.
проворота всех элементов передач привода на 1800, замера после этого колебательного процесса и выделения из него гармоники ![]() по оговоренной выше методике его математической фильтрации.
по оговоренной выше методике его математической фильтрации.
На рис.4 представлены схемы формирования гармоник, выделяемых при различных условиях замера колебательного процесса:
• гармоника ![]() с параметрами
с параметрами ![]() ,
, ![]() , выделенная из колебательного процесса при исходном состоянии рассматриваемого ротационного агрегата, –
, выделенная из колебательного процесса при исходном состоянии рассматриваемого ротационного агрегата, –
![]() ; (8)
; (8)
• гармоника ![]() с параметрами
с параметрами ![]() ,
, ![]() , выделенная из колебательного процесса, зафиксированного после проворота рассматриваемого ротора на 1800 относительно других агрегатов машины, –
, выделенная из колебательного процесса, зафиксированного после проворота рассматриваемого ротора на 1800 относительно других агрегатов машины, –
![]() ; (9)
; (9)
• гармоника ![]() с параметрами
с параметрами ![]() ,
, ![]() , выделенная из колебательного процесса, зафиксированного у ротора, прошедшего определение
, выделенная из колебательного процесса, зафиксированного у ротора, прошедшего определение ![]() после проворота на 1800 всех элементов передач этого ротора, –
после проворота на 1800 всех элементов передач этого ротора, –
![]() . (10) Суммируя (8), (9), находим
. (10) Суммируя (8), (9), находим ![]() , что после подстановки в (10) позволяет получить
, что после подстановки в (10) позволяет получить
![]() . (11)
. (11)
Поскольку характеристики ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() гармоник правой части (11) определены, используя алгоритм
гармоник правой части (11) определены, используя алгоритм
![]() ;
;
![]() ;
;
![]() ;
; ![]() ,
,
находим для рассматриваемого случая параметры ![]() ,
, ![]() информативной гармоники
информативной гармоники ![]() , зависящие только от характеристик неуравновешенности рассматриваемого ротора.
, зависящие только от характеристик неуравновешенности рассматриваемого ротора.
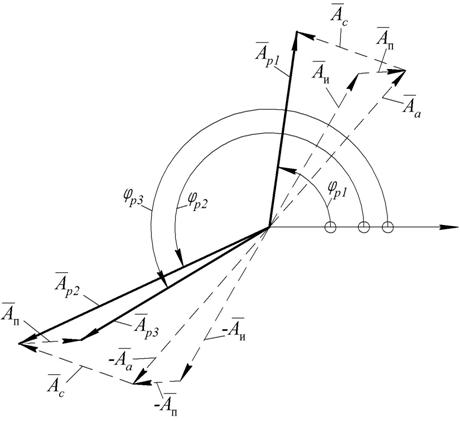
Рис. 4. К определению ![]() для привода, не допускающего при пуске случайного конечного проворота ротора.
для привода, не допускающего при пуске случайного конечного проворота ротора.
Т.к. конечной целью всех проводимых замеров и расчетов является выделение гармоники ![]() , то для последнего случая излишним является предварительное определение гармоники
, то для последнего случая излишним является предварительное определение гармоники ![]() по ранее представленной методике с проведением расчетов для нахождения гармоники
по ранее представленной методике с проведением расчетов для нахождения гармоники ![]() . Для выделения
. Для выделения ![]() в этом случае замеры и обработку результатов надо проводить только для выявления параметров гармоники
в этом случае замеры и обработку результатов надо проводить только для выявления параметров гармоники ![]() по зависимости (8) и гармоники
по зависимости (8) и гармоники ![]() по зависимости (10). Последний замер проводится после проворота ротора в сборе относительно других агрегатов машины на 1800 и поворота рабочих элементов всех передач ротора относительно их посадочных мест на валу на 1800.
по зависимости (10). Последний замер проводится после проворота ротора в сборе относительно других агрегатов машины на 1800 и поворота рабочих элементов всех передач ротора относительно их посадочных мест на валу на 1800.
Для случая, когда проворот элементов передач не допускается соединением этих элементов с валом ротора, гармоника ![]() может быть отделена от
может быть отделена от ![]() только в случае, когда
только в случае, когда ![]() .
.
Поясняя последнее, заметим, что в общем случае частота вращения ![]() рассматриваемого ротора может быть изменена вариацией частоты вращения приводного двигателя, вариатором или коробкой скоростей. При этом отдельные или все компоненты
рассматриваемого ротора может быть изменена вариацией частоты вращения приводного двигателя, вариатором или коробкой скоростей. При этом отдельные или все компоненты ![]() по (2) могут иметь инерционную природу и менять свои характеристики с изменением n; меняет свои характеристики и гармоника
по (2) могут иметь инерционную природу и менять свои характеристики с изменением n; меняет свои характеристики и гармоника ![]() , требующая отделения. При вращении рассматриваемого ротора в дорезонансном режиме с вариацией n амплитуда и фаза
, требующая отделения. При вращении рассматриваемого ротора в дорезонансном режиме с вариацией n амплитуда и фаза ![]() изменяться не будут, т.к. эта гармоника возбуждается не инерционными усилиями, а является следствием деформаций связей ротора из-за наличия погрешностей исполнения элементов его передач. Однако при этом амплитуда
изменяться не будут, т.к. эта гармоника возбуждается не инерционными усилиями, а является следствием деформаций связей ротора из-за наличия погрешностей исполнения элементов его передач. Однако при этом амплитуда ![]() гармоники
гармоники ![]() будет изменяться пропорционально
будет изменяться пропорционально ![]() .
.
Если предварительным анализом установлено, что для рассматриваемого ротора ![]()
![]() , то производя регистрацию и обработку колебательных процессов на двух частотах n и
, то производя регистрацию и обработку колебательных процессов на двух частотах n и ![]() вращения ротора, найдём
вращения ротора, найдём ![]() ,
, ![]() , определяемые как
, определяемые как
![]() ;
; ![]() ;
;  . (12)
. (12)
Имея определенными параметры ![]() ,
, ![]() ,
, ![]() ,
, ![]() гармоник
гармоник ![]() ,
, ![]() , решая (12) как систему, с помощью алгоритма:
, решая (12) как систему, с помощью алгоритма:
 ;
;  ;
;
![]() ;
; ![]() ,
,
находим искомые параметры ![]() ,
, ![]() информативной гармоники.
информативной гармоники.
При отсутствии возможности проворота элементов передач рассматриваемого ротора и ![]()
![]() разделение
разделение ![]() на гармоники
на гармоники ![]() и
и ![]() не представляется возможным.
не представляется возможным.
По изложенным выше материалам разработан обобщенный алгоритм и программный комплект для ЭВМ по выделению ![]() при балансировке ротационного агрегата на машине, который может использоваться и при диагностике качества балансировки ротационных агрегатов при производственных испытаниях машин, и при их ремонте, требующем балансировки.
при балансировке ротационного агрегата на машине, который может использоваться и при диагностике качества балансировки ротационных агрегатов при производственных испытаниях машин, и при их ремонте, требующем балансировки.
Литература
1.ГОСТ 19534-74. Балансировка вращающихся тел. Термины. – М.: Изд-во стандартов, 1974. – 29 с.
2.Лукьянов А.Д. Рекурсивный алгоритм наименьших квадратов в микропроцессорной системе балансировки ротора. – Современные проблемы информатизации в технике и в технологиях. Вып.13: Сб. тр. – Воронеж: Научная книга, 2008. – С. 301-302.