Взаимодействие частиц минеральных удобрений с криволинейными лопатками вертикального ротора
Аннотация
Дата поступления статьи: 23.04.2014В статье приведены результаты теоретических исследований роторного рассеивателя минеральных удобрений. Для устранения неблагоприятных условий ударного взаимодействий частиц удобрений с лопатками ротора, рассматривается возможность применения криволинейных лопаток. Обоснованы силы, действующие на частицу, которая движется по криволинейной лопатке. Представлены схемы действия сил и схема взаимодействия частиц удобрений с криволинейной лопаткой с учетом ширины потока. Приведено численное решение трансцендентного уравнения по методу Рунге-Кутты. Проведен анализ зависимостей кинематических режимов работы разбрасывающего аппарата от конструктивных параметров криволинейной лопатки. Определено время взаимодействия частицы удобрения с поверхностью лопатки с учетом ее кривизны и угла наклона. Сделаны выводы о возможности снижения дробления частиц удобрений за счет уменьшения удара в направлении нормали.
Ключевые слова: удобрение, лопатка, ротор, кривизна, угол наклона, скорость, дробление
Дробление частиц минеральных удобрений, как правило, приводит к снижению их эффективности [1]. Оно сопровождается увеличением доли мелких частиц в общей массе, что ведет к снижению равномерности рассева [2, 3].
Для устранения неблагоприятных условий удара частиц удобрений о рабочие органы ротора рассмотрим возможность применения лопаток в форме окружности в плане. Этот вопрос неоднократно рассматривался в работах целого ряда авторов, применительно к центробежно-дисковым аппаратам [4 - 6].
Представим рабочую поверхность лопатки в виде части окружности радиуса ![]() , и отклоним назад на угол
, и отклоним назад на угол ![]() . Для улучшения процесса движения частиц и увеличения скорости метания, расположим рассматриваемую лопатку вогнутой поверхностью по направлению вращения ротора.
. Для улучшения процесса движения частиц и увеличения скорости метания, расположим рассматриваемую лопатку вогнутой поверхностью по направлению вращения ротора.
Схема сил, действующих на движущуюся частицу удобрения по вогнутой поверхности лопатки, показана на рис. 1.
Дифференциальное уравнение движения частицы по поверхности лопатки имеет вид [7]:
![]() . (1)
. (1)
Преобразуем уравнение (1), для чего рассмотрим совокупность сил, действующих на частицу при движении по вогнутой поверхности лопатки (рисунок 1), из которого следует, что
![]() ;
; ![]() ,
,
где ![]() – радиус кривизны поверхности лопатки, м;
– радиус кривизны поверхности лопатки, м;  – центральный угол, пройденного пути частицы, град;
– центральный угол, пройденного пути частицы, град; ![]() – начальное значение центрального угла, град;
– начальное значение центрального угла, град; ![]() – угловая скорость.
– угловая скорость.
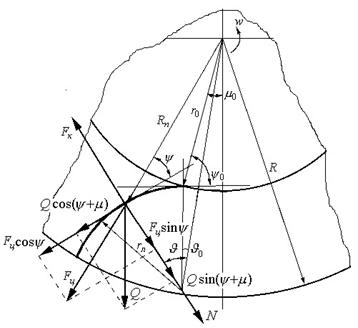
Рис. 1. – Схема сил, действующих на частицу при движении по вогнутой поверхности лопатки
Подставив полученные значения в уравнение (1), получим нелинейное дифференциальное уравнение второго порядка следующего вида:
 (2)
(2)
Для получения численного решения данного дифференциального уравнения (2) необходимо его преобразовать в систему двух уравнений первого порядка [8], то есть преобразовать нелинейное уравнение к форме Каши. Для этого введем обозначения , в результате получим систему уравнений первого порядка относительно функций пути
, в результате получим систему уравнений первого порядка относительно функций пути ![]() и относительной скорости
и относительной скорости ![]() :
:
 (3)
(3)
Решение полученной системы уравнений (3) базируется на методе численного интегрирования Рунге-Кутты второго порядка с коррекцией в средней точке. Основная идея данного метода заключается в том, что производные аппроксимируются через значение самой искомой функции, в интервале выбранного шага, для перехода из точки в другую требуется дважды вычислить правую часть дифференциального уравнения, чтобы обеспечить наибольшую близость к ряду Тейлора.
Решение системы уравнений при начальных условиях ![]() ,
, ![]() ,
, ![]() дает возможность вычислить время движения частицы по поверхности лопатки на пути, равном
дает возможность вычислить время движения частицы по поверхности лопатки на пути, равном ![]() и скорость
и скорость ![]() до момента схода частицы с конца лопатки. Для определения абсолютной скорости и ее направления в момент схода с лопатки, введем дополнительное условие
до момента схода частицы с конца лопатки. Для определения абсолютной скорости и ее направления в момент схода с лопатки, введем дополнительное условие ![]() .
.
Для определении угла и направления схода необходимо учесть тот факт, что время ![]() соответствует продолжительности движения частицы удобрения по лопатке рассеивателя с радиальными лопатками. У рассеивателей с наклонными лопатками, тем более с лопатками в виде части окружности в плане, значение времени
соответствует продолжительности движения частицы удобрения по лопатке рассеивателя с радиальными лопатками. У рассеивателей с наклонными лопатками, тем более с лопатками в виде части окружности в плане, значение времени ![]() необходимо понимать как условное время. С действительным временем
необходимо понимать как условное время. С действительным временем ![]() движения частицы удобрения угол и направление схода связаны соотношением:
движения частицы удобрения угол и направление схода связаны соотношением:
![]() , (4)
, (4)
где ![]() – угол наклона лопатки к радиусу ротора, град;
– угол наклона лопатки к радиусу ротора, град;  – центральный угол раствора лопатки, град.
– центральный угол раствора лопатки, град.
Решение уравнений (3), (4) и анализ полученных зависимостей показывает, что на абсолютную скорость и величину угла схода частиц удобрений с конца лопатки оказывают влияние кинематические параметры, начальная скорость поступления частиц на лопатку ![]() , скорость вращения ротора
, скорость вращения ротора ![]() , а так же геометрические параметры, угол наклона лопаток относительно начального радиуса
, а так же геометрические параметры, угол наклона лопаток относительно начального радиуса ![]() , радиус кривизны поверхности
, радиус кривизны поверхности ![]() и центральный угол раствора
и центральный угол раствора ![]() .
.
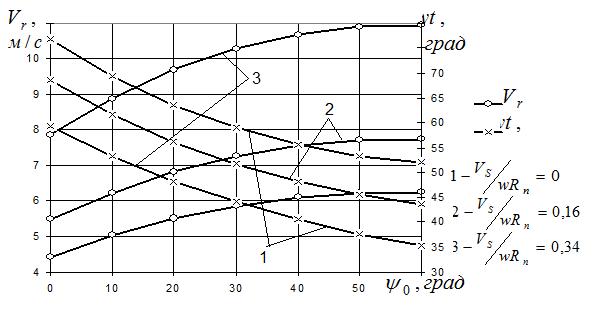
Рис. 2. – Зависимость абсолютной скорости и угла схода от геометрических параметров лопаток при различных значениях кинематического показателя
В результате анализа можно видеть, что увеличение кинематического показателя ![]() вызывает уменьшение угла схода и рост абсолютной скорости (рис 2). Изменение угла схода
вызывает уменьшение угла схода и рост абсолютной скорости (рис 2). Изменение угла схода ![]() от кинематического показателя
от кинематического показателя ![]() близка к линейной зависимости. При отклонении лопатки назад, то есть увеличении угла наклона лопатки к начальному радиусу, эта зависимость постепенно смещается в сторону уменьшения углов схода. Примерно тоже, происходит с зависимостью абсолютной скорости, которая с ростом угла отклонения
близка к линейной зависимости. При отклонении лопатки назад, то есть увеличении угла наклона лопатки к начальному радиусу, эта зависимость постепенно смещается в сторону уменьшения углов схода. Примерно тоже, происходит с зависимостью абсолютной скорости, которая с ростом угла отклонения ![]() вызывает увеличения значений абсолютной скорости. При этом вид зависимости абсолютной скорости, позволяет сделать вывод о наличии экстремума, то есть дальнейшее увеличение угла наклона вызовет снижение абсолютной скорости.
вызывает увеличения значений абсолютной скорости. При этом вид зависимости абсолютной скорости, позволяет сделать вывод о наличии экстремума, то есть дальнейшее увеличение угла наклона вызовет снижение абсолютной скорости.
Анализ влияния геометрических параметров кривизны лопаток (рис. 3) на величину угла схода и абсолютной скорости показал, что отклонение лопаток назад по ходу вращения ротора, вызывает уменьшение угла схода и увеличение абсолютной скорости. Необходимо отметить, что зависимость угла отклонения лопатки ![]() от абсолютной скорости
от абсолютной скорости ![]() имеет экстремум, положение которого определяется кинематикой работы роторного рассеивателя [9].
имеет экстремум, положение которого определяется кинематикой работы роторного рассеивателя [9].
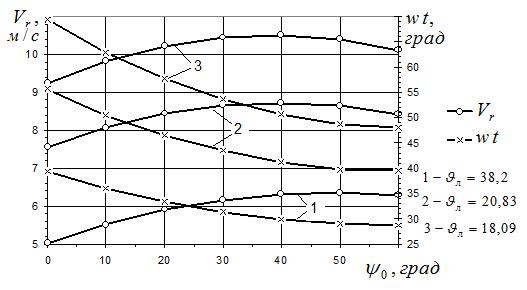
Рис. 3. – Зависимость абсолютной скорости и угла схода от геометрических параметров криволинейной поверхности лопатки
Полученные зависимости позволяют выявить влияние на величину абсолютной скорости и угла схода при работе рассеивателя с криволинейными лопатками, таких факторов как радиус кривизны поверхности, центральный угол раствора, угол отклонения лопатки, а так же параметров поступления частиц на лопатки. Для того, чтобы учесть влияние последних, рассмотрим процесс поступления частиц на поверхность лопатки
Процесс поступления частицы удобрений с туконаправителя на лопатки ротора происходит с некоторой начальной скоростью ![]() на радиусе
на радиусе ![]() с учетом свободного падения до момента встречи с лопаткой на расстоянии
с учетом свободного падения до момента встречи с лопаткой на расстоянии ![]() [10, 11].
[10, 11].
Для определения максимального расстояния ![]() (рис. 4), на котором произойдет встреча частицы при свободном падении, воспользуемся формулой равноускоренного движения.
(рис. 4), на котором произойдет встреча частицы при свободном падении, воспользуемся формулой равноускоренного движения.
![]() , (5)
, (5)
где ![]() – время падения частицы до встречи с лопаткой, с;
– время падения частицы до встречи с лопаткой, с; ![]() – угол наклона туконаправителя к горизонту, град.
– угол наклона туконаправителя к горизонту, град.
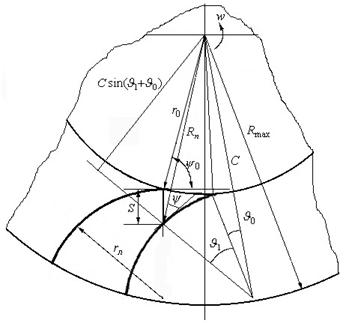
Рис. 4. – Схема взаимодействия частиц удобрений с криволинейной поверхностью с учетом наклона лопатки и ширины потока
![]() , (6)
, (6)
где  – центральный угол, учитывающий отклонение лопатки к начальному радиусу, град;
– центральный угол, учитывающий отклонение лопатки к начальному радиусу, град;  – центральный угол, учитывающий ширину потока, град;
– центральный угол, учитывающий ширину потока, град; ![]() – количество лопаток.
– количество лопаток.
С учетом кривизны поверхности, решение поставленной задачи выглядит в виде системы уравнений:
 (7)
(7)
где ![]() – радиус точки встречи частицы с лопаткой, м.
– радиус точки встречи частицы с лопаткой, м.
Решение полученной системы уравнений дает время свободного падения частиц до момента встречи с лопаткой и центральный угол ![]() этой встречи.
этой встречи.
Таким образом, применение лопаток с формой поверхности в виде части окружности в плане позволяет уменьшить дробление частиц минеральных удобрений за счет уменьшения удара.
Литература:
- Забродин, В.П. Анализ взаимодействия частиц с лопаткой наружного диска распределительного рабочего органа [Текст] // Совершенствование технологических процессов и конструкций сельскохозяйственных машин. – Краснодар, 1989. – Вып. 294(322). – С. 84-91.
- Петренко С.С. Определение конструктивных параметров шнекового смесителя сыпучих материалов [Электронный ресурс] // «Инженерный вестник Дона», 2013, №1 – Режим доступа: http://www.ivdon.ru/magazine/archive/n1y2013/1536 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Воронин В.В., Адигамов К.А., Петренко С.С., Сизякин Р.А. Критерии и способы оценки качества смешивания сыпучих материалов [Электронный ресурс] // «Инженерный вестник Дона», 2012, №4 (часть 2) – Режим доступа: http://www.ivdon.ru/magazine/archive/n4p2y2012/1400 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Забродин, В.П. Распределительный рабочий орган разбрасывателей удобрений [Текст] // Механизация и электрификация сел. хоз-ва. – 1985. – №7. – С. 25-27.
- Olieslagers R., Ramon H., Baerdemaeker J. De. Calculation of Fertilizer Distribution Patterns from a Spinning Disc Spreader by means of a Simulation Model [Text] // Journal of Agricultural Engineering Research. – 1996. – №63 (2), pp. 137-152.
- Van Liedekerke P., Tijskens E., Dintwa E. DEM simulations of the particle flow on a centrifugal fertilizer spreader [Text] // Powder Technology. – 2009. – №190 (3), pp. 348-360.
- Хаджиев А.Х., Дадаходжаев А. Некоторые вопросы теории криволинейного движения частиц минеральных удобрений по неподвижной горизонтальной плоскости [Текст] // Вопросы механизации и электрификации сел. хоз-ва. – Ташкент, 1982. – Вып. 23. – С. 3-13.
- Мудров А.Е. Численные методы для ПЭВМ на языке Бейсик, Фортран и Паскаль [Текст] / А.Е. Мудров. – Томск: МП «Раско», 1991. – 272 с.
- Черноволов, В.А. К определению угла сектора рассева центробежного дискового аппарата с радиальными лопатками [Текст]. // Тр. АЧИМСХа. Сер. Механизация сельского хозяйства. – 1971. – Вып. 20.- С. 46-48.
- Жилин, А.П. Исследование движения минеральных удобрений в роторе с горизонтальной осью вращения [Текст] / Исследование, проектирование и производство рабочих органов сельскохозяйственных машин. – Ростов на Дону, 1980. – С. 35-38.
- Жилин А.П. К определению некоторых параметров роторной разгрузочной тележки для склада минеральных удобрений [Текст] / Комплексная механизация и автоматизация сельскохозяйственного производства. – Ростов на Дону, 1981. – С. 130-134.