Метод декомпозиции в построении адаптивных гидроакустических систем
Аннотация
Для исследования сложных гидроакустических систем применен метод декомпозиции. Описываются особенности использования метода применительно к гидроакустическим системам. Предлагается четырехуровневая иерархия подсистем декомпозиции. Представлена схема первого уровня семантической декомпозиции. Описаны управляемые модули, позволяющие строить адаптивные системы.
Ключевые слова: декомпозиция, гидроакустические системы, иерархия подсистем
Термин «декомпозиция» в применении как к математическим, имитационным моделям вообще, так и к моделям управляемых процессов в современной научной литературе точно не определен. Будем использовать следующее определение. Декомпозиция – это научный метод, использующий структуру задачи и позволяющий заменить решение одной большой задачи решением серии меньших задач.Наиболее часто декомпозиция проводится путем построения дерева целей и дерева функций [1].В действительности глубина декомпозиции ограничивается. Если при декомпозиции выясняется, что модель начинает описывать внутренний алгоритм функционирования элемента вместо закона его функционирования в виде «черного ящика», то в этом случае произошло изменение уровня абстракции. Это означает выход за пределы цели исследования системы и, следовательно, вызывает прекращение декомпозиции.
В современных методиках [1] типичной является декомпозиция модели на глубину 5–6 уровней. На такую глубину декомпозируется обычно одна из подсистем. Функции, которые требуют такого уровня детализации, часто очень важны, и их детальное описание дает ключ к основам работы всей системы.
В общей теории систем [1] доказано, что большинство систем могут быть декомпозированы на базовые представления подсистем. К ним относят: последовательное (каскадное) соединение элементов, параллельное соединение элементов, соединение с помощью обратной связи.
Проблема проведения декомпозиции состоит в том, что в сложных системах отсутствует однозначное соответствие между законом функционирования подсистем и алгоритмом, его реализующим. Поэтому осуществляется формирование нескольких вариантов (или одного варианта, если система отображена в виде иерархической структуры) декомпозиции системы. Главные методические концепции декомпозиции применительно к построению акустической модели океана [2-4] соответствуют ее расчленению на подсистемы и такому последующему формальному их описанию, которое позволяет вычислить (на основе задания критериев, ограничений, априорной информации об акустических условиях гидролокации и соответствующих гипотез) те характеристики имитационной модели, которые существенны в решаемой научной или прикладной задаче. Естественно, что построение имитационной модели методами декомпозиции должно предусматривать потенциальные возможности ее совершенствования, модернизации, т.е. содержать в себе возможность дальнейшего развития модели.
Итак, физико-математическая декомпозиция сводится к иерархическим процедурам расчленения общей акустической модели на совокупности подсистем. Такая процедура должна продолжаться тех пор пока в дальнейшей декомпозиции необходимости не будет.
Рассмотрим разновидности иерархических подсистем, которые возникают в процессе декомпозиции при построении акустической модели применительно к общей модели параметрической гидролокации [5, 6].
Подсистемой будем называть любую часть рассматриваемой сложной системы, которая с какой-либо принятой точки зрения может считаться самостоятельной по своему функциональному назначению и информационным связям. Естественно, что всякая подсистема в свою очередь может представлять собой сложную систему, так что, вообще говоря, полная акустическая система подвергается декомпозиции неоднократно, т.е. иерархически: на подсистемы первого уровня, которые далее подвергаются декомпозиции на подсистемы второго уровня и т.д. С этой точки зрения декомпозиция сводится к определению иерархии подсистем, последний (наиболее высокий) уровень которых соответствует элементарным составляющим – модулям имитационной компьютерной модели и информационно согласуется с математическим обеспечением ПК.
Акустическая сложная система описывается моделью, для которой можно предложить иерархию подсистем, состоящую из четырех уровней [5, 6]. В [5] описана информационная операторная модель гидролокации и принципы ее декомпозиции. Здесь данная модель адаптирована и преобразована для случая параметрической гидролокации, т.е. в качестве гидроакустических средств используются параметрические излучатели, нашедшие широкое применение в ряде гидроакустических задач благодаря своим уникальным свойствам [7].
Рассмотрим четыре уровня декомпозиции.
Семантические подсистемы – первый уровень декомпозиции. Подсистемы этого типа представляют собой такие части акустической системы, которые соответствуют наиболее укрупненному информационному, гидрофизическому и системному содержанию общей модели параметрической гидролокации как исходной сложной системы. С информационной точки зрения семантические подсистемы описываются с помощью векторных функций векторных аргументов и соответствующими векторными операторами преобразования этих функций [4]. Семантические подсистемы должны образовывать в своей совокупности полную акустическую модель, так как дальнейшая декомпозиция будет относиться к уточнению и детализации их внутреннего содержания, особенностей построения и к специфике информационных связей. Иными словами, декомпозиция на уровне семантических подсистем вскрывает главные, наиболее укрупненные и содержательные акустические и системные элементы общей модели параметрической гидролокации. При этом декомпозиция на рассматриваемом уровне определяет более конкретно конструктивное содержание рассматриваемой модели, т.е. детальную информационно-гидрофизическую структуру семантических подсистем. Отличие семантических подсистем друг от друга сводится, таким образом, к их содержательному функциональному, физическому и системному различию.
На рис. 1 представлена информационно-операторная схема первого уровня декомпозиции, соответствующая семантическим подсистемам. Дадим общую характеристику модели параметрической гидролокации при ее декомпозиции на рассматриваемом уровне [6]. Семантические подсистемы сосредоточены в шести группах, каждая подсистема описывается вектор-функцией определенного типа.
На рис. 1 приняты следующие обозначения: вектор-функции размещены в прямоугольниках; однократные операторы – в одиночных окружностях, а двукратные – в двойных окружностях; стрелками обозначены входные данные, которые должны поступать из соответствующих баз данных. Множества, содержащие управляемые данные, обозначены индексом 1, а информационные данные (которые определяются внешней средой модели) – индексом 0.
Рассмотрим группы семантических подсистем, т.е. соответствующих вектор-функций, операторы и базы данных которых образуют эти подсистемы.
Характеристики источников акустических полей описывают 1-ю группу семантических подсистем (см. рис. 1). Сюда входят две подсистемы.
Управляемые источники акустических полей описываются с помощью вектор-функции![]() . В рассматриваемом случае это – электроакустический преобразователь накачки и формирователь сигналов параметрической антенны. Эти источники управляемые в том смысле, что их можно проектировать, управлять их характеристиками.
. В рассматриваемом случае это – электроакустический преобразователь накачки и формирователь сигналов параметрической антенны. Эти источники управляемые в том смысле, что их можно проектировать, управлять их характеристиками.
Множество ![]() представляет собой выбор вариантов исполнения источников и их характеристик. Это множество носит управляющий характер (индекс 1 вверху). Таким образом, с его помощью выполняется целенаправленное управление излучаемыми сигналами, которые используются параметрической гидролокационной системой.
представляет собой выбор вариантов исполнения источников и их характеристик. Это множество носит управляющий характер (индекс 1 вверху). Таким образом, с его помощью выполняется целенаправленное управление излучаемыми сигналами, которые используются параметрической гидролокационной системой.
Неуправляемые источники акустических полей описываются с помощью вектор-функции ![]() .Это могут быть источники, связанные с различными неоднородностями: надводными и подводными течениями, волнением водной поверхности, с атмосферными явлениями, с жизнедеятельностью различных биологических организмов, судоходством и работой различных технических систем, с протеканием сейсмических явлений и другими причинами различного физического происхождения. Обозначение соответствующего множества –
.Это могут быть источники, связанные с различными неоднородностями: надводными и подводными течениями, волнением водной поверхности, с атмосферными явлениями, с жизнедеятельностью различных биологических организмов, судоходством и работой различных технических систем, с протеканием сейсмических явлений и другими причинами различного физического происхождения. Обозначение соответствующего множества – ![]() , оно носит информационный характер (индекс 0 вверху). Это множество представляет собой набор вариантов рассматриваемых источников с указанием условий, при которых эти источники себя проявляют. При дальнейшей декомпозиции на морфологические подсистемы необходимо учесть специфику классов неуправляемых источников.
, оно носит информационный характер (индекс 0 вверху). Это множество представляет собой набор вариантов рассматриваемых источников с указанием условий, при которых эти источники себя проявляют. При дальнейшей декомпозиции на морфологические подсистемы необходимо учесть специфику классов неуправляемых источников.
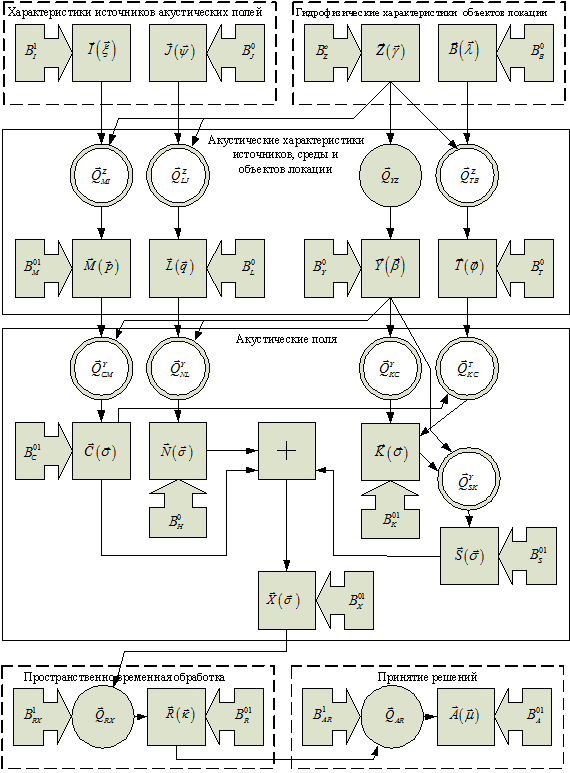
Рис. 1. Декомпозиция модели параметрической гидролокации на уровне семантических подсистем
Гидрофизические и физические характеристики объектов локации описывают 2-ю группу семантических подсистем (см. рис. 1). Она состоит из двух подсистем.
Характеристики среды описываются с помощью вектор-функции![]() .К таким характеристикам относятся температура, соленость воды, наличие воздушных пузырьков, ее химический состав, динамика движения водных масс, биологический состав, структура и химический состав дна, а также волнение водной поверхности некоторые другие характеристики водной поверхности, водных масс и дна.
.К таким характеристикам относятся температура, соленость воды, наличие воздушных пузырьков, ее химический состав, динамика движения водных масс, биологический состав, структура и химический состав дна, а также волнение водной поверхности некоторые другие характеристики водной поверхности, водных масс и дна.
Отметим, что отдельные составляющие вектор-функции![]() взаимосвязаны с некоторыми составляющими вектор-функции
взаимосвязаны с некоторыми составляющими вектор-функции ![]() неуправляемых источников.
неуправляемых источников.
Отметим, что отдельные составляющие вектор-функции взаимосвязаны с некоторыми составляющими вектор-функции неуправляемых источников.управляемыми элементами семантической модели параметрической гидролокации являются следующие (см. рис. 1 ): управляемые источники акустических полей ![]() и их акустические характеристики
и их акустические характеристики ![]() ; к управляемым операторам относятся операторы формирования акустических характеристик излучающих антенн
; к управляемым операторам относятся операторы формирования акустических характеристик излучающих антенн ![]() , операторы пространственно-частотно-временной обработки
, операторы пространственно-частотно-временной обработки ![]() и операторы принятия решений
и операторы принятия решений ![]() .
.
Остальные рассмотренные семантические подсистемы являются неуправляемыми: сюда относятся характеристики естественных источников акустических шумов в океане ![]() и их акустические характеристики
и их акустические характеристики ![]() ,гидрофизические характеристики
,гидрофизические характеристики ![]() и акустические характеристики среды
и акустические характеристики среды ![]() , а также физические характеристики объектов локации
, а также физические характеристики объектов локации ![]() и их акустические характеристики
и их акустические характеристики ![]() .Неуправляемыми являются также операторы
.Неуправляемыми являются также операторы ![]() .
.
Работа выполнена при поддержке Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 гг. ГК № П1148., ГК №16.740.11.0327, соглашение №14.А18.21.1284 и при поддержке Федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007-2013 годы» ГК №14.518.11.7068.
Литература:
1. Павловский Ю.Н., Смирнова Т.Г. Проблема декомпозиции в математическом моделировании. – М.: ФАЗИС, 1998.
2. Кириченко И.А., Старченко И. Б. Принцип адаптивного подхода к управлению характеристиками акустических систем // Электронный научно-инновационный журнал «Инженерный вестник Дона».- Ростов-на-Дону. – 2011.- №4 http://www.ivdon.ru/magazine/archive/n4y2011/553/
3. Ольшевский В.В. Опыт применения метода декомпозиции при построении акустико-океанологических имитационных моделей. // В сб. Акустические методы исследования океана. Вып. 303 –Л.: Судостроение, 1979. – С. 19–26.
4. Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников и др. – 2-е изд., перераб и доп. – Л.: Судостроение, 1988. – 552 с.
5. Ольшевский В.В. Декомпозиция как метод построения акустико-океанологических имитационных моделей. – Львов, 1980. – 72 с.
6.Starchenko, Decomposition method in constructing simulation models of parametric location for statistically irregular mediums (Метод декомпозиции в построении имитационных моделей параметрической локации для статистически неоднородных сред) [Текст] / I. Starchenko // J. Acoust. Soc. Am. – April, 2005. –Vol. 117, №. 4. – P. 2576.
7. Новиков Б.К., Руденко О.В., Тимошенко В.И. Нелинейная гидроакустика. – Л.: Судостроение, 1981. – 264 с.