Метод оптической идентификации железнодорожных подвижных единиц на основе интегральных устойчивых признаков
Аннотация
Дата поступления статьи: 12.12.2013Решение задачи идентификации железнодорожных подвижных единиц является актуальным при переходе от автоматизированных систем управления (АСУ) с ручным вводом данных к среде автоматического моделирования поездной и вагонной ситуации. Наиболее приемлемым с экономической и организационной точек зрения методом идентификации является оптическое распознавание инвентарных номеров подвижных единиц. Однако при использовании такой технологии возникает вопрос о достоверности распознавания. В настоящей статье представлен качественно новый подход к оптической идентификации вагонов, основанный на использовании интегральных устойчивых конструктивных признаков вагонов и позволяющий значительно повысить уровень достоверности распознавания. Действие предлагаемого метода было исследовано на объекте внедрения системы автоматического распознавания номеров вагонов (АРНВ). Проведенные вычислительные эксперименты доказали актуальность применения описываемого метода при оптическом распознавании «слабочитаемых» инвентарных номеров подвижных единиц.
Ключевые слова: АСУ, идентификация номеров, подвижная единица, оптическое распознавание, АРНВ, устойчивые признаки
05.13.18 - Математическое моделирование, численные методы и комплексы программ
Введение. Технологичность процесса управления движением поездов на железнодорожном транспорте является одним из основных критериев оценки показателей безопасности, рентабельности, а также уровня технического развития сети дорог в целом. В настоящее время происходит переход от автоматизированных систем управления (АСУ) [1] с «ручным» вводом данных о формировании, расформировании и проследовании составов к среде автоматического моделирования поездной и вагонной ситуации на полигоне [2-3], открывая при этом новые возможности для персонала дирекции движения и в целом грузовой и коммерческой деятельности компании ОАО «РЖД».
Важную роль при совершенствовании АСУиграет решение задачи идентификации подвижного состава. По итогам анализа отечественного и международного опыта можно выделить следующие технологии идентификации железнодорожных подвижных единиц:
- спутниковое трекирование;
- считывание пассивных индуктивных меток;
- оптическое распознавание.
В первых двух случаях предусмотрено размещение дополнительного бортового оборудования на всем вагонном парке, заходящем в сеть дорог ОАО «РЖД». Реализация такого подхода требует принципиальных организационных решений и значительных экономических затрат, имеющих прямое отношение к российским и зарубежным собственникам вагонного парка. В этом смысле технология оптического распознавания номеров вагонов свободна от перечисленных недостатков и имеет ряд преимуществ, относящихся к возможности коммерческого осмотра и визуального контроля достоверности данных. Однако остается вопрос о достоверности распознавания и, как следствие, уровне автоматизации функционирования таких систем.
Постановка задачи. На текущий момент задача таких систем идентификации подвижных единиц, как система АРНВ [4], заключается в распознавании инвентарных номеров по их графическому изображению. Такая обработка представляет собой сложный ресурсоемкий процесс, укрупненный алгоритм которого выглядит следующим образом:
– локализация области расположения инвентарного номера;
– сегментация находящихся в ней цифр номера;
– классификация сегментированных цифр.
Все этапы приведенного алгоритма являются тонко-организованными и взаимозависимыми. Очевидно, что уровень достоверности идентификации прямо пропорционален их суммарному результату. В связи с этим каждый этап алгоритма постоянно дополняется и совершенствуется [5-7].
Однако на практике в большинстве случаев проблемы распознавания связаны с физической «нечитаемостью» инвентарного номера, даже при привлечении человека. Всё это следствия уровня эксплуатационного износа, качества обслуживания и воздействия внешних факторов, таких как род перевозимых грузов, погодные условия, загрязнение, несоответствие утвержденному альбому [8] и др. В этой связи существует необходимость разработки качественно новых подходов, охватывающих ту часть парка вагонов, которая по ряду указанных выше причин является «сложноидентифицируемой».
В настоящей статье для решения поставленной задачи предлагается новый подход в области оптической идентификации подвижных единиц, заключающийся в создании базы данных, элементами которой являются интегральные устойчивые признаки, характеризующие индивидуальность внешнего вида отдельной подвижной единицы. В этом случае процесс идентификации сводится к обнаружению устойчивых признаков у текущей подвижной единицы и сравнении их с имеющимися в базе данных.
Наиболее комфортными условиями для формирования базы данных устойчивых признаков для конечного объема вагонного парка являются условия промышленных предприятий с собственной ж.д. инфраструктурой или локальные ж.д. полигоны, огражденные постами идентификации, так как в этих случаях вероятность повторного прохождения какой-либо подвижной единицы достаточно велика.
Для создания базы данных предлагается применить методы поиска отличительных особенностей на изображении путем создания карты векторов устойчивых признаков. В основу предлагаемого метода положен алгоритм ускоренного поиска устойчивых признаков (SpeededUpRobustFeatures, SURF) [9].
Ускоренный поиск устойчивых признаков.SURF решает две задачи – поиск особых точек изображения и создание их дескрипторов, инвариантных к масштабу и вращению.
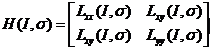
Обнаружение точек устойчивых признаков, или особых точек, осуществляется за счет матрицы Гессе, элементами которой являются производные второго порядка Гауссовской свертки интегрального изображения
 ,
,
где σ – коэффициент масштаба,
Lxy(I,σ) – частная производная второго порядка Гауссовской свертки интегрального изображения в точке I = (x,y).
По сути, элементы матрицы Гессе находятся как сумма произведений пикселов изображения на фильтры, изображенные на рис. 1. Белые области соответствуют значению +1, черные -2 (на третьем фильтре -1), серые – нулевые. Пространственный масштабфильтров, представленных на рис. 1 – 9x9 пикселов.
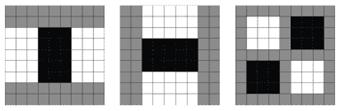
Рис. 1. – Фильтры, используемые для нахождения матрицы Гессе в SURF
Чтобы создать инвариантность относительно масштабирования изображения, для одного и того же пиксела применяются поочередно различные масштабы фильтров (15x15, 21x21 , 27х27 и т.д.).
Дескриптор представляет собой окрестность особой точки
![]() , (1)
, (1)
где dx – преобразование Хаара для горизонтальной ориентации особой точки;
dy – преобразование Хаара для вертикальной ориентации особой точки.
Дескриптор устойчив к шуму, геометрическим и фотометрическим искажениям.
Решение задачи распознавания сложноидентифицируемых подвижных единиц.Предлагаемый метод распознавания состоит из следующих этапов:
1.Формирование базы устойчивых признаков. На первом этапе создаются карты дескрипторов изображений подвижных единиц (объектов), когда-либо зафиксированных системой АРНВ. Для одного объекта карта устойчивых признаков представляет собой кортеж
![]() (2)
(2)
где Vi – совокупность дескрипторов кадра, представляющего объект;
n – количество кадров, при совмещении которых можно создать панорамное изображение объекта.
Vi определяется как массив дескрипторов, вычисленных по формуле (1).
На рис.2 продемонстрировано визуальное изображение дескрипторов одного кадра подвижной единицы. Каждой окружности соответствует оригинальный дескриптор. Разные размеры окружностей являются результатом применения фильтров (рис. 1) разных размеров к исходному изображению.
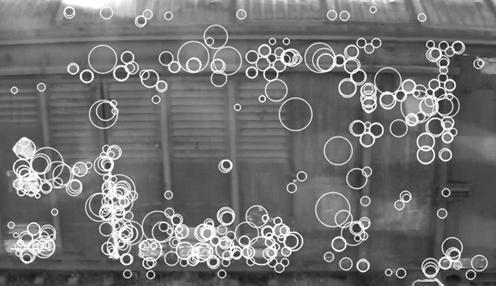
Рис. 2. – Визуализация дескрипторов изображения
2. Получение дескрипторов текущего изображения (сцены). Исследуемый кадр подвергается SURF-обработке с параметрами, аналогичными параметрам анализа базовых объектов, после чего по формуле (2) создается карта его устойчивых признаков.
3. Сравнение базовых дескрипторов и дескрипторов сцены. Определяется мера схожести между векторами устойчивых признаков различных изображений с помощью расстояния Махаланобиса [10]:
![]()
где viobject и vjscene– i-ый вектор устойчивых признаков объекта и j-ый вектор устойчивых признаков сцены соответственно;
n – количество дескрипторов объекта;
m – количество дескрипторов сцены;
S – ковариационная матрица этих векторов.
Результатом текущего этапа является набор схожих индивидуальных признаков. Для двух подвижных единиц такой набор определяется множеством схожих признаков всех представляющих кадров.
На рис.3 приведен пример выполнения вышеприведенных вычислений, где для визуального удобства на одном изображении отображены кадр сцены (снизу) и кадр объекта (сверху), а схожие дескрипторы соединены отрезками.
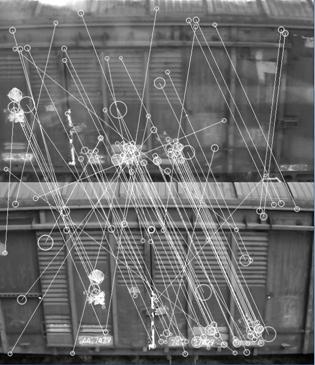
Рис. 3. – Результаты сравнения дескрипторов кадра объекта и кадра сцены
4. Фильтрация дескрипторов. Как видно по рис.3, разные области конструктива подвижной единицы имеют схожие дескрипторы. В связи с этим, на текущем этапе вводится ряд ограничений, адаптирующих применение алгоритма SURF к процессу идентификации подвижных единиц.
Во-первых, так как расстояние от камер системы АРНВ до устойчивых признаков анализируемого вагона априори известно, то отношение размеров всех дескрипторов на сцене к размерам соответствующих им дескрипторов на объекте должно быть пропорционально этому расстоянию. Поэтому после приведения изображений к заданному масштабу можно ввести ограничение равенства размеров дескрипторов объекта и сцены.
Во-вторых, так как особые точки во время передвижения подвижного состава во время продвижения точки контроля не меняют положения по оси ординат, мы можем ввести ограничение приблизительного равенства ординат:
![]() , (3)
, (3)
где yiobjectyiscene – ординаты схожих дескрипторов объекта и сцены соответственно;
l –количество пар схожих дескрипторов.
В-третьих, в виду того, что ордината неизменна при изменении абсциссы, отрезки между схожими дескрипторами должны располагаться параллельно друг другу.
Отрезки между схожими дескрипторами Di могут быть представлены в виде вектора
 ,
,
где Ri – длина текущего отрезка между схожими дескрипторами (показатель длины);
ai – угол между текущим отрезком и осью абсцисс (угловой коэффициент).
Ri определяется по формуле нахождения длины отрезка:
 , (4)
, (4)
где xiobjectи yiobject – координаты i-го дескриптора объекта;
xjscene и yjscene – координаты i-го дескриптора сцены.
ai определяется по следующей формуле:
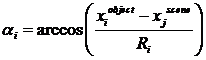 .
.
Для удобства анализа векторов Di рассмотрим их отображения в двумерной системе координат, где абсциссе соответствует угловой коэффициент a, а ординате – показатель длины R для найденных отрезков между дескрипторами (рис.4).
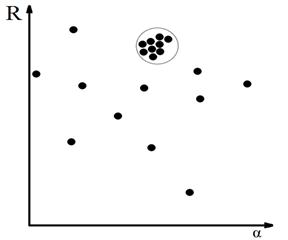
Рис.4. – Проекция отрезков расстояний между дескрипторами в фазовом пространстве
По рис.4 нетрудно выделить имеющееся скопление точек. Исходя из условия большинства схожих дескрипторов объекта и сцены можно сделать вывод, что точки, лежащие вне данного скопления, будут соответствовать ложно выявленным фактам схожести. Чтобы избавиться от них, введем ограничение для каждой точки по расстоянию в рассмотренном фазовом пространстве. Ограничение определяется эмпирически, а расстояние определяется по формуле (4), где в качестве абсциссы выступает a, а в качестве ординаты выступает R. Остальные точки, попавшие в ограничение, будут являться «соседними». Точка, имеющая максимальное число соседей, будет являться центром скопления. Следовательно, для избавления от ложно выявленных фактов схожестинеобходимо оставить центр скопления и соседние к нему точки.
Для демонстрации результата применения введенных ограничений, вернемся к изображению рис.3 с отфильтрованными отрезками между схожими дескрипторами(рис.5).
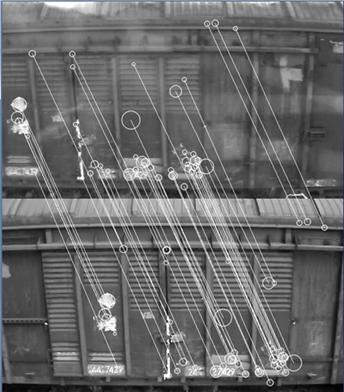
Рис.5. – Результат применения фильтрации дескрипторов
5. Классификация. Последний этап предлагаемого метода состоит в присваивании инвентарного номера на основе пороговой функции:
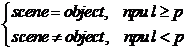 ,
,
где p – пороговое значение количества схожих дескрипторов, выбираемое эмпирически.
Вычислительные эксперименты.Эффективность разработанного метода проверялась на множестве данных, полученных с реального объекта внедрения системы АРНВ в течение полугодового срока и содержащего изображения 150000 подвижных единиц, из которых в процессе эксплуатации было распознано 144463 (96,3 %). Для вычислительных экспериментов была проанализирована выборка из 1000 вагонов, случайным образом сформированная из множества слабоидентифицируемых подвижных единиц. При проведении экспериментов ограничение в фазовом пространстве было принято равным 15, а порог p– 10.
В результате применения изложенного подхода было идентифицировано 763 подвижных единицы (76,3 % от рассмотренной выборки). Таким образом, благодаря применению предлагаемого подхода к оптическому распознаванию, для конкретного объекта АРНВ общее количество достоверно распознанных вагонов существенно увеличилось и составило:
![]() .
.
В качестве примера реализации рассмотрим 3 кадра не идентифицированной подвижной единицы, полученные с одной камеры при плохих погодных условиях (рис.6).

Рис.6. – Сцена
По рисунку видно, что подвижная единица является сложноидентифицируемой не только для системы АРНВ, но и для визуального анализа оператором, в том числе из-за неблагоприятных погодных условий. Однако в базе данных существуют дескрипторы изображения представленного вагона при прохождении им через систему идентификации ранее, а также присвоенный ему системой идентификационный номер – 69681402 (рис.7).

Рис.7. – Объект
Продемонстрируем результаты экспериментов на изображении, представленном на рис.8, на котором сцена расположена в нижней части, а объект – в верхней.
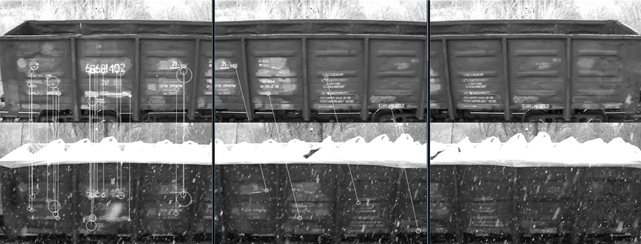
Рис.8. – Результаты применения предлагаемого метода на сложноидентифицируемой подвижной единице.
Анализируя выявленные факты схожести дескрипторов, можно точно сказать, что на сцене и объекте изображена одна и та же подвижная единица, так как их количество равно 24.
Для демонстрации применимости приведенного метода в задаче оптической идентификации проиллюстрируем на рис.9 пример сравнения сцены, представленной ранее (рис.6) с объектом, представляющим подвижную единицу, отличную отпредставленной на сцене, но с близкими визуальными конструктивными признаками.
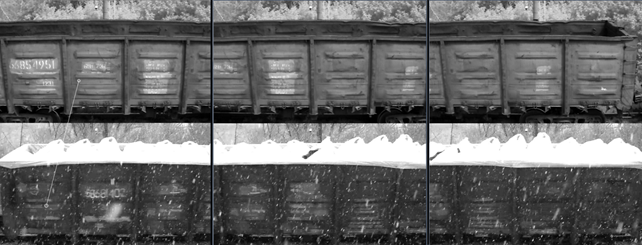
Рис.9. – Результаты применения предлагаемого метода при сравнении разных вагонов.
По результатам сравнения можно сделать вывод, что объект и сцена имеют всего 1 общий признак, что меньше порогового значения. Следовательно, они представляют разные подвижные единицы.
Заключение. Предложенный в статье подход, основанный на интегральных признаках изображений, позволяет идентифицировать подвижные единицы на основании их индивидуальных устойчивых конструктивных признаков, что в комплексе с существующими технологиями позволяет существенно повысить достоверность распознавания. Метод реализован в составе системы автоматического распознавания номеров вагонов. Результаты вычислительных экспериментов обосновывают применимость идентификации вагонов на основе баз данных устойчивых признаков.
Работа выполнена при финансовой поддержке РФФИ, проект № 13-07-00226 А, проект № 13-07-13109 офи_м_РЖД и при финансовой поддержке ФГБОУ ВПО РГУПС, договор № 625/3.
Литература:
1. Комплексная автоматизированная система управления железнодорожным транспортом (АСУЖТ). Под ред. А.П.Петрова, М.: Транспорт, 1977, 598 с.
2. Калинин, Т.С. Спектрально-сигнатурная диагностика микропроцессорных информационно-управляющих систем железнодорожной автоматики и телемеханики [Электронный ресурс] // «Инженерный вестник Дона», 2012, №1. – Режим доступа: http://ivdon.ru/magazine/archive/n1y2012/687 (доступ свободный) – Загл. с экрана. – Яз.рус.
3. Умрихин Н.Г. Экспертная система классификации устройств и процессов на предприятиях ж.д. транспорта [Электронный ресурс] // «Инженерный вестник Дона», 2013, №1. – Режим доступа: http://www.ivdon.ru/magazine/archive/n1y2013/1520 (доступ свободный) – Загл. с экрана. – Яз.рус.
4. Артемьев И.С. Разработка модели автоматического распознавания номеров вагонов // Международная научная конференция (механика и трибология транспортных систем) «МехТрибоТранс-2011» – Ростов-на-Дону: Изд-во РГУПС, 2011, № 7. – с. 146-149.
5. Артемьев И.С., Долгий А.И., Суханов А.В., Хатламаджиян А.Е.Нейроиммунная модель классификации в задачах идентификации на транспорте // Интегрированные модели и мягкие вычисления в искусственном интеллекте. Сборник научных трудов VII-й Международной научно-технической конференции (Коломна, 20-22 мая 2013 г.). В 3-х томах. Т.3. – М.: Физматлит, 2013. c. 980 – 987.
6. Артемьев И.С., Лебедев А.И. Прогностическая модель сегментации трафаретных цифр в задаче оптической идентификации инвентарных номеров железнодорожных подвижных единиц // Труды международной научно-практической конференции «Транспорт-2013». Апрель 2013 г. В 4-х частях. Часть 2. Технические науки. Рост.гос. ун-т. путей сообщения. Ростов н/Д, 2013. с. 7 – 9.
7.Артемьев И.С., Лебедев А.И. Модель автоматического распознавания номеров вагонов с применением сложных морфологических преобразований // Труды Международной научно-практической конференции "Транспорт-2012", Ростов-на-Дону: Изд-во РГУПС, 2012, Ч.1, c. 3
8. Альбом «Знаки и надписи на вагонах грузового парка колеи 1520мм» № 632-2006 ПКБ ЦВ ОАО «РЖД».
9. Bay H., Ess A., Tuytelaars T., Gool L.V. SURF: Speeded Up Robust Features // Computer Vision and Image Understanding (CVIU) – 2008 – Vol. 110, № 3, pp. 346-359.
10. Mahalanobis P. C. On the generalised distance in statistics // Proceedings of the National Institute of Sciences of India 2 (1) – 1936 – pp. 49-55.